Having successfully obtained my level 1 certification at the June launch of the Big Sky Rocketry Association, I began to plan for my level 2 certification.
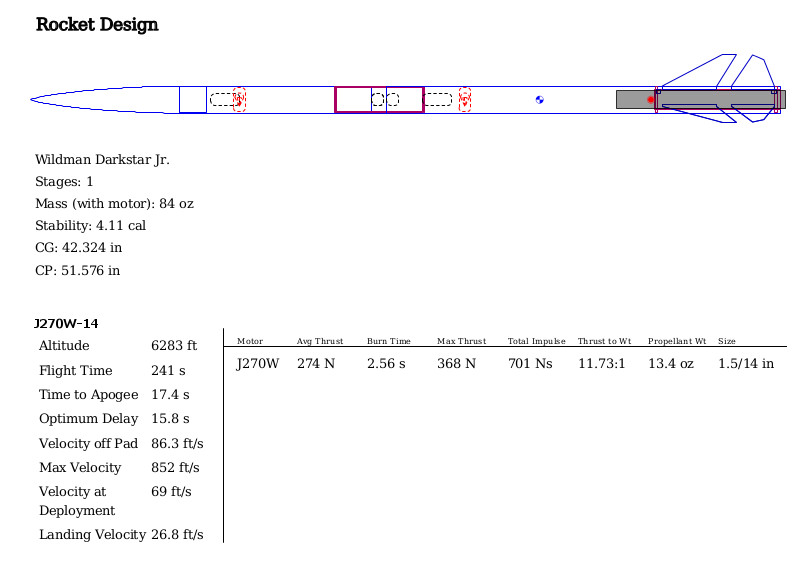
I decided to use the same Wildman Darkstar Jr rocket that I used in my Level 1 certification, but decided to go with electronic duel deployment for recovery during the level 2 flight.
The motor I selected, an Aerotech J270W-14A, showed a simulated apogee of 6283 feet, which it would reach in 17.4 seconds at a maximum velocity of 86.3 ft/s.
I did a detailed inspection of the rocket to ensure that it hadn’t been damaged in any way during the level 1 flight, and found that everything was in working order, and aside from a bit of dirt and dust on one of the fins, the rocket appeared as new.
Having flown the Quantum in the level 1 flight, I was a bit more comfortable with its operation and began researching ejection charges in detail. I then began testing various charge amounts in live tests for both the payload and booster sections. After a number of tests, I determined the optimum charges were XX grams for the booster section, and XX grams for the payload section. The nylon shear pins I had purchased also performed correctly in all of the tests, giving me confidence they would work during the actual flight.
The last bit of prep I conducted was experimenting with various methods of folding the main chute to fit it in the payload section along with the Eggfinder GPS locator. The 50″ chute I used during the level 1 flight was a tight fit in the booster section during the original flight, but with some careful folding and compression, I found it would fit cleanly in the payload section and eject consistently.
I had been studying for the level 2 test for about a month before my level 1 flight with the intent to certify and then complete the written test after the flight, but due to circumstances outside of anyone’s control, the person with the tests had to leave the launch early so the test still had to be completed. My studying system involved memorizing all of the questions in the NAR level 2 Exam testing pool, and then taking the on-line practice tests for Section A, Section B, Section C, Section D, and Section E at least once a day requiring a 100% on all sections. Using this method, it wasn’t long until I could quickly answer all of the questions in the testing pool correctly, and I was confident I would have no issue with the test itself.
Having completed all of these preparations prior to the July launch date, I was very disappointed, but understood and agreed with the reasoning behind the decision, when the July launch was cancelled due to fire dangers. As the summer unfolded with one of the worst fire seasons in the history of the state, I was unsurprised when the August and September launches were also scrubbed. Finally, with some much needed moisture finally arriving in the September, the October launch was confirmed as a go. The night before the launch, the weather forecast warned of winds exceeding 20 mph shortly before noon and continuing to increase throughout the afternoon, so I made sure I had as much of the rocket prepped as possible with the intent to arrive, take the test, finish prepping the rocket and launch as soon as possible to avoid the distinct possibility of the launch having to be cancelled due to the winds.
My son and I then got up very early on Saturday morning to make the 4+ hour drive to the launch location. The drive was uneventful, and the day dawned clear and sunny. The wind was fairly steady throughout the drive, but appeared to be staying around 10mph.
Once at the launch site, and having checked in with the launch organizers (who I had already contacted to ensure that someone would have the written test available, and to let them know I was planning the cert flight), I soon found myself sitting at a table with a copy of the test. My son, who is currently in school, found it funny that “dad” had to take a test just like he did, and he wondered if I would remember how to do it. When I completed the test less than five minutes later and got a 100%, he decided that I must have been pretty good at taking tests.
With the written test out of the way, it was time to prep the rocket and get in line to fly. There were three other flyers attempting certification flights that day, two for level 1 with one planning a level 2 flight if he was successful, and one going for his level 3. Having done most of the prepping the night before, it didn’t take long to complete my checklist items, connect the blackpowder charges to the Quantum, connect all the batteries, and prep the rocket motor.
After watching three other rockets launch with out issue, it was my turn and I headed out to far pad. The rocket slid easily onto the rail, but it took a bit of time finding the right size rocks to position the nozzle of the blast plate. After arming the Quantum, and ensuring that I heard the proper sequence of beeps, I then inserted the ignitor, hooked it up (after confirming that the clips were not powered), and confirmed continuity.
It was then back to the line where I announced the rocket and motor details, and my son counted down and pushed the button. The rocket motor ignited very quickly and the rocket left the pad leaving a large circle of exhaust. The flame coming out of the motor was as long as the rocket itself, and while the sound wasn’t as good as an M, N, or O, it was still very impressive.
The rocket boosted straight up, and despite the steady winds, didn’t seem to be effected at all.
As the rocket continued its ascent, everything appeared to be proceeding as planned and the motor burnout was observed.
The rocket was visually tracked to apogee, and the two halves separated with the drogue shoot appearing shortly thereafter. The rocket was tracked throughout the descent, and the second ejection event was observed with the main appearing quickly and slowing the rockets decent. During the entire descent, the Eggfinder receiver was receiving GPS location details from the rocket, and the location continued to update until the rocket disappeared from view behind a nearby hill.
After entering the location data into my phone, my son and I began the hike to retrieve the rocket. After a small detour to help another flyer locate their rocket, we arrived at the location shown on the Eggfinder as the last known location. The rocket was not visible, but after holding the Eggfinder over my head, it began receiving updated location information, and the new location coordinates led us straight to the rocket.
The rocket was undamaged and a quick inspection showed that all of the components were present and appeared to have functioned as planned. After downloading the flight data from the Quantum, I repacked the chutes, put the rocket back together and began the walk back to the line.
Once we were back, Steve Shannon inspected the rocket and confirmed that it was in flyable condition. He then signed off on my NAR Level 2 High Power Certification Application.
After mailing in the certification paperwork to NAR HQ, I again received an updated card and then a level 2 pin. The pins are pretty cool, but I’m not sure where I’m going to end up putting them as I would hate to have them damaged.
The road to my level 1 HPR certification began with an impulse buy of a Wildman Darkstar Jr kit during a Black Saturday sale. The kit was fiberglass, looked awesome, and the price was low enough that it seemed like too good of a deal to pass up. Once the kit arrived, it looked even better than the on-line photos, and all of the various bits and pieces fit together nicely. Then the reality that I had no experience building fiberglass kits or what would need to be different when compared to more traditional low power kits sat in, and the kit went back into its box.
After obtaining and reading the book Modern High-Power Rocketry Vol 2, combing the internet for build threads, tips and tricks, and basically satisfying myself that I would at least have a general idea of what would be required to build a high powered rocket, I pulled the kit back out of the box and began to contemplate my build.
The details of the kit from the Wildman website were as follows:
This fiberglass dual deployment rocket features a 38mm motor mount, making it a great L1 or L2 certification kit. Standing nearly five feet tall and measuring 2.1″ in diameter, it weighs just 4.5 pounds and can be flown on motors from H through J impulse.
This Kit Includes:
1 Fiberglass booster airframe
1 Fiberglass payload bay
1 Fiberglass coupler
1 Fiberglass avionics bay switch band
6 Fiberglass fins
2 Centering rings
2 Single-piece stepped avionics bay lids
38mm fiberglass motor mount tube
Filament-wound nosecone
I knew from the beginning that I would not be focusing on performance or any sort of “Wow” factor. I wanted to build the equivalent of a flying tank that would be able to survive as many mistakes as possible and remain in a flying condition. With that in mind, I began assembling the various components I would need for the build.
I decided to follow the steps outlined in a post I located on the rocketryforum.com website, where member Crazy Jim, AKA Jim Hendrickson, went into exquisite detail on how to build not only a fiberglass high power, rocket but this exact kit! The tips, tricks, various methods, and other details found throughout the thread, along with the step by step directions, including pictures, made the whole process seem less complex and by breaking it all down into small steps, it suddenly didn’t seem to be as overwhelming as it had in the beginning. The thread can be found here.
I had purchased an Aeropack 38mm motor retainer, appropriate lengths of kevlar, rail buttons, and some Rocketpoxy epoxy when I originally bought the kit, so it I had to decide on what hardware I would need to hook everything together, electronics, and finally parachutes for recovery.
I decided to attach the booster recovery harness directly to the motor mount using epoxy rather than trying to fit some sort of U-bolt or eye bolt into the tiny space between the 38mm motor mount tube and the 2.2″ body tube. After cleaning, sanding, and dry-fitting all of the parts together for the booster section of the rocket, I carefully labeled and marked the position of all of the centering rings, fins, fillet pull lines, rail button locations, and vent holes. I then followed the steps in the thread and the motor mount and fins quickly went from loose pieces of fiberglass to the complete lower half of a rocket. When it was all assembled, the fact that booster section alone was larger than any of my current low power or medium power rockets brought home the fact that this was going to be quite the rocket when it was completed!
The nose cone and payload section went together without any issues. I decided to make the nose cone bulk head removable and epoxied a piece of all-thread into the tip (it would have been nice to have a threaded aluminum tip, but my generation of the kit didn’t ship with one), and then secured the bulk head to the all thread using multiple bolts and lock washers. I then installed a u-bolt to all for the recovery harness attachment.
This left the e-bay section as the final piece to complete. It would have likely been completed earlier, but there were so many different ways of putting it together, and each had benefits and downsides, that it took quite a while to decide how to proceed. After reviewing multiple methods of constructing the section, and checking the price on the required hardware for each method, I settled on using a single piece of all-thread running down the center of the section with a u-bolt on both ends. Although this method wasn’t as elegant as some, it was cost effective, and all of the required hardware was available locally.
Now that the rocket itself was complete, I began to contemplate the actual launch and obtaining a motor for my certification flight. For those that may not be aware, many HPR motors are required to be shipped as hazmat, and the roughly $30 fee can easily double the cost of a single motor. Because of this, I contacted Steve Shannon with the Big Sky Rocketry Association to determine if their launches ever were attended by a vendor, or how their members purchased their motors. Steve explained their system of group ordering (the hazmat fee is the same if you order 1 or 100 motors) to save on shipping, and advised me that their annual group order was fast approaching. After making arrangements to be contacted when the ordering process began, I went back to planning for my level 1 cert flight.
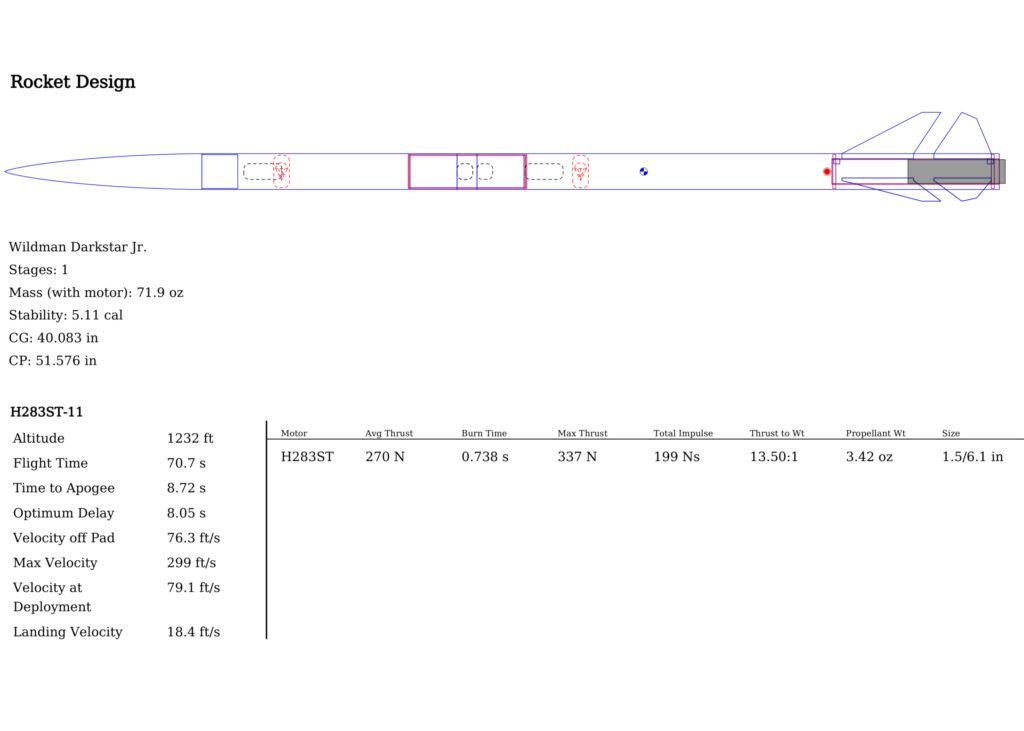
Using the freely available rocket simulator software, OpenRocket, I created the virtual model of my rocket, updating the various section’s weight and center of gravity details, and began to “test” various motor options. Although I originally planned to use Aerotech reloadable motors, the costs of the motor cases and the lower price of the singe use motor began to make that option more appealing. After numerous hours tweaking various settings in the simulator and testing various motors, I decided on the Aerotech H-283-W single use motor. The simulation showed an expected altitude of 1232 feet with an 8.72 second time to apogee. This would keep the entire flight easily within eye sight, and would allow me to use the motor’s ejection charge rather than rely on an electronic device for deployment.
Having the motor selected gave me the final weight needed to determine what parachute to use for recovery. After trying various sizes of basic, flat, parachutes (or more accurately parasheets) in the simulator, I determined that a chute about 50″ would bring the rocket down at a safe 18 feet per second. The parachute was ordered and I began the process of constructing the recovery harnesses for both the booster and payload sections. Although I wouldn’t be using the payload section for recovery during this flight, I planned to attach the recovery harness to avoid any unexpected separations or other issues. I had originally planned to use kevlar for both harnesses, but I did not have enough on hand to provide the lengths I wanted for both harnesses, and after reading about the benefits of nylon (stretches, doesn’t zipper as easily), and discovering a method of using masking tape to provide burn resistance, I decided to construct the booster harness from nylon webbing and use the smaller kevlar webbing in the payload section where space was limited.
Although I had originally planned to fly the rocket naked (no paint), I had time to spare so I planned out and rattle canned a basic neon-green and black paint job. I also used Future floor polish to give the rocket a clear coat. It didn’t turn out too bad, and from launch distance, it looks awesome!
The final assembly pieces to come together before the launch were an Eggtimer Quantum flight computer and an Eggfinder mini GPS locator. Although the flight would use motor eject for recovery, I wanted to test out the Quantum and become comfortable with its operation for my eventual level 2 certification. I also planned on flying the rocket with the Quantum activated and an ejection charge loaded as an extra piece of insurance incase the motor ejection had some sort of failure. After assembling, testing, and familiarizing myself with both devices functions and basic operation, I mounted the Quantum in the e-bay and built an enclosure for the Eggfinder that attached to the payload recovery harness.
I then obtained some FFFF black powder and began ground testing my ejection charges. I researched methods of determining the amount of black powder required for the size of rocket I was attempting to separate and began the tests. It appeared that 1.2 grams of powder were sufficient to separate the booster from the front of the rocket without the nose cone hitting the end of the recovery harness.
The week before the launch date arrived, but the ordered parachute had not. The vendor stated that the order should arrive in time for the launch, but when it didn’t arrive on the day before the launch, plan B kicked in and a quick trip to the fabric store provided the nylon, while the local farm and ranch store provided a small diameter rope for shroud lines. After reading a few sites that detailed how to construct a parachute, I managed to build one and still get a few hours of sleep before leaving for the launch.
The launch was held at the Big Sky Rocketry Association’s Twin Bridges location, which is about a four hour drive! The launch was held on June 24, 2017, and the day was clear and warm.
After arriving at the launch site, checking in with the launch organizers, paying my motor bill and my membership in the Big Sky Rocketry Association, I began to get things ready for the launch.
I had created a check list to make sure that everything was completed, and in the proper order, and after confirming that the only item that needed to be witnessed was the motor assembly, I found a qualified witness, Andrew Horton, and completed the very simple assembly for the single use Aerotech motor under his observation. Once the motor was installed, I put the rocket together, confirmed everything was working properly and had power, had the rocket inspected by the RSO, and then proceeded to the launch pad.
The rocket went onto the rail without an issue (and I was thanked for using rail buttons rather than launch lugs), and after receiving a quick tutorial in how the club’s launch system functioned, the ignitor was installed, continuity was confirmed, and it was back to the launch control table.
After announcing the certification flight, the rocket and motor details, and the expected altitude, I began the count down and pushed the button! The motor ignited quickly and the rocket quickly left the pad only slightly weather cocking as it hit winds a few hundred feet up. The rocket was tracked to apogee and the two sections were observed to have separated and the main chute deployed. The rocket was then visually tracked during the descent while audio confirmation could be heard from the Eggfinder Receiver that the rocket’s on-board GPS tracking device was functioning properly. The rocket hit a few thermals on the way down, but stayed with-in line of sight until it landed a few hills over.
Once the rocket was down, I grabbed the Eggfinder Receiver, plugged the coordinates in to my phone’s mapping application, and proceeded to walk towards the last location where the rocket was observed. As always seems to be the case, the rocket was actually further away than it appeared, but the Egg finder system worked properly and updated the final location when I got close. Using the phone’s mapping app, I was able to walk right up to the rocket.
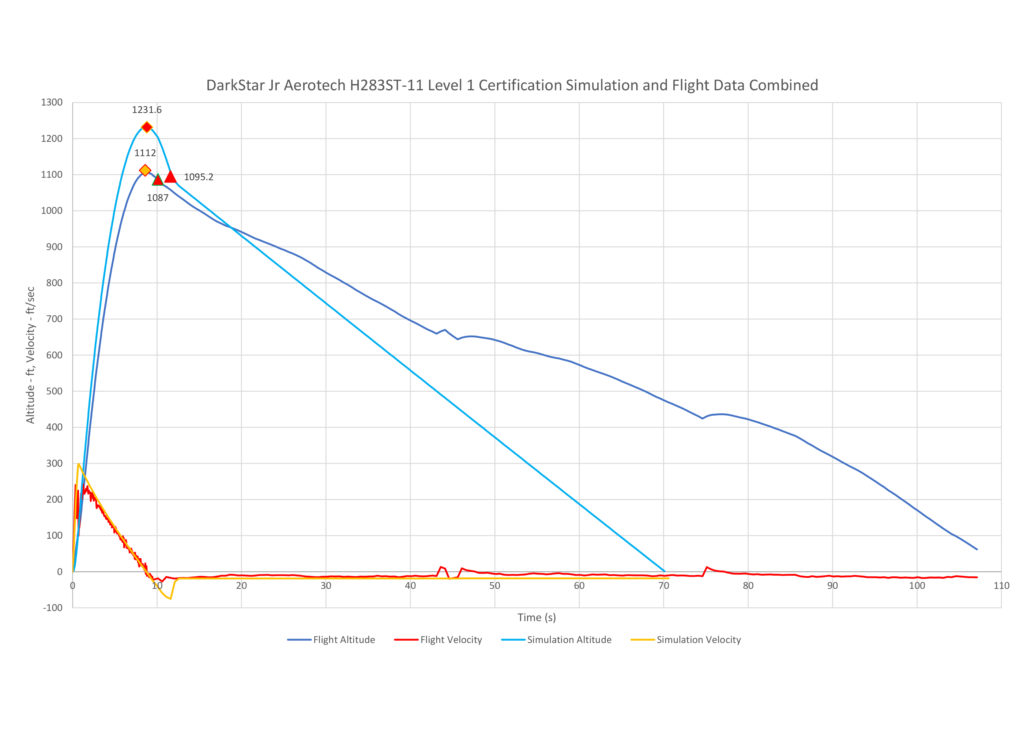
The rocket did not have any visible damage, and after checking all of the fins and other components, I determined that nothing had been damaged during the flight and descent. I also could see that the Quantum had fired the ejection charge, and later review of it’s logs confirmed it had been fired shortly after apogee. After connecting to the Quantum with my phone, it showed the rocket had reached 1112 feet in 8.6 seconds with an average acceleration of 6.24Gs, and had landed 107.6 seconds after launch detection.
After returning the rocket, it was inspected by Andrew Horton and Dale Emery who agreed that it was undamaged and signed off on the NAR High Power Certification Application completing my Level 1 Certification.
After disassembling the rocket and cleaning out the booster and rear of the rocket, I watched a few more launches, discussed returning the next month to take the level 2 test (there had been some confusion and they didn’t have one available at the launch that day) and possibly do my level 2 flight, then packed the car and left for Idaho.
A short time after submitting the paperwork to NAR HQ, my new Level 1 card arrived in the mail, then shortly after that I received an unexpected surprise of a Level 1 pin.
Having taken a year off to pursue other interests, we are getting back to the rockets, and are starting to get a bit more serious!
Having recently joined National Association of Rocketry, and with plans to pursue a High Power Certification in the near future, the latest launch involved one of the largest 29mm reloadable motors.
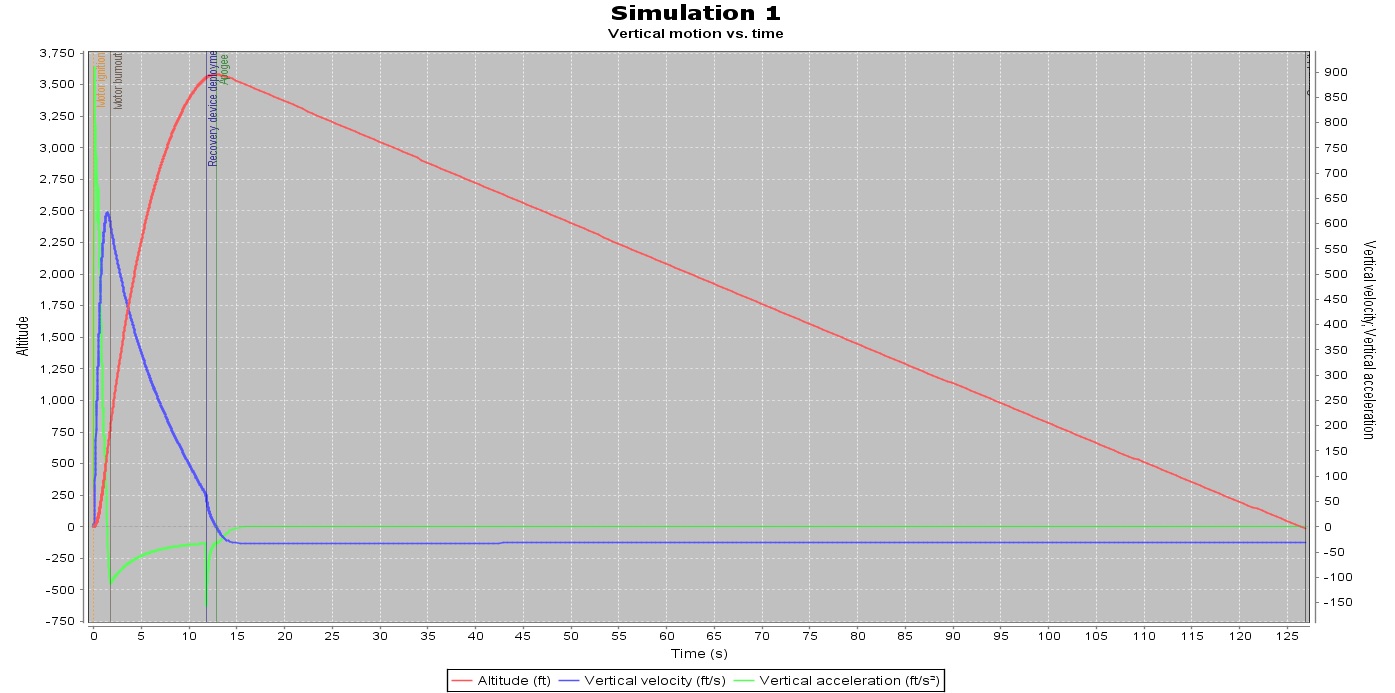
The simulations showed the rocket hitting appogee at 3581, which was
This page will chronicle the progress through the National Association of Rocketry’s NARTREK Gold Achievement program.
In order to successfully complete this program, the following requirements must be met:
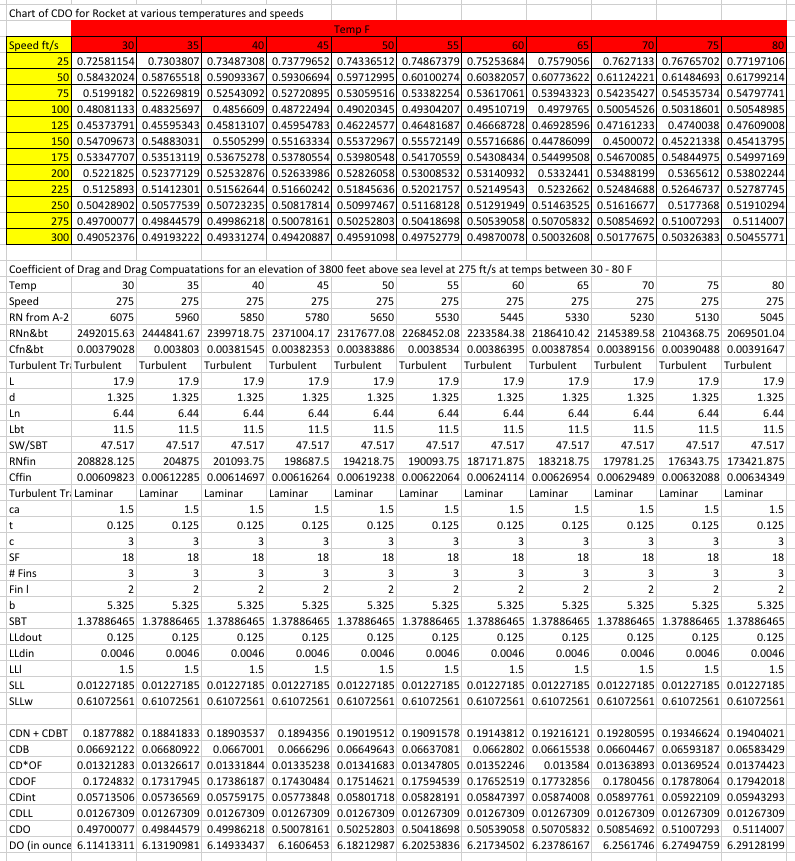
1. Design your own model rocket. It may be a sport, contest or payload model. Compute the Center of Pressure (CP) using the Barrowman Method (His original NARAM-8 report can be found here, and is also covered in Centuri Reports TIR-30 and TIR-33) or calculate the CP using one of the available computer programs. Estimate the Center of Gravity of your model with the largest expected rocket motor installed. Evaluate the static stability of your model. Compute the predicted altitude of your design, assuming various drag coefficients (CD). You may do this using the Centuri Report TIR-100 or Estes TR-10 (missing page TR-10_Fig 9B) and TR-11, or you may use one of the commercially available or freeware programs available on the Internet.
2. Build and fly your rocket design. Determine the altitude to which it flies by using standard tracking system methods or by use of an on-board altimeter. You may also use a stop-watch and the drop-streamer method described in Handbook of Model Rocketry, Chapter 17, by G. Harry Stine. Make at least three (3) flights with each of at least two (2) types of motors and compute the average altitude achieved for each motor type. This is a minimum of at least six (6) flights. Using this data and your previous flight performance calculations, estimate the actual drag coefficient of your model. Record the flight information and the results of your calculations on the Flight summary Sheet that came with your Gold packet. Be sure to complete the comparison of predicted to actual performance.
3. Submit the Requirement Certification sheet completely filled out. Take a photograph of your model and attach it to the certification sheet. Also attach a dimensioned drawing of your model showing all dimensions necessary to allow someone else to build your design from this drawing. Attach the center of pressure calculations, flight performance calculations, and flight performance data for your design.
As with most of the NARTREK sections, I started off with a great idea of how to complete this section, then ran into hangups that required a switch of direction mid project. In this case, I started with a rocket based off of the Estes Viking but with modified body tube and fin design. Although the rocket was stable, and the completed models flew without any issues, the body tube was too small to accommodate an altimeter and I wasn’t able to get a good result using a streamer drop (likely because of the cold weather at the time of launch), so I decided to go back to the drawing board and design a larger rocket capable of containing the altimeter.
While considering options, I came across an old Estes Helio-Coptor kit given to me by a family member who’s son had never built it. The body tube had been crushed on one end at some point, but there were still 11.5 inches of usable tube left and the nose cone, engine mount, and other components were all in decent shape. After chopping the tube, I measured and weighed all of the components and ended up with the following dimensioned drawing of the model.
Dimensioned drawing of the model design.
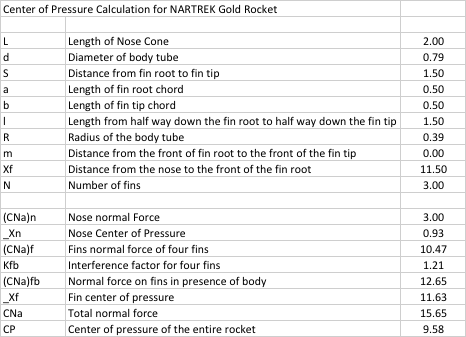
Calculation of the Center of Pressure of my design.
Although it wasn’t required to complete this level, I decided to do all of the math by hand. Using the Barrowman method described in Centuri Report TIR-33, I arrived at a Center of Pressure location 13.85 inches from the tip of the nose. The following graphic shows my work:
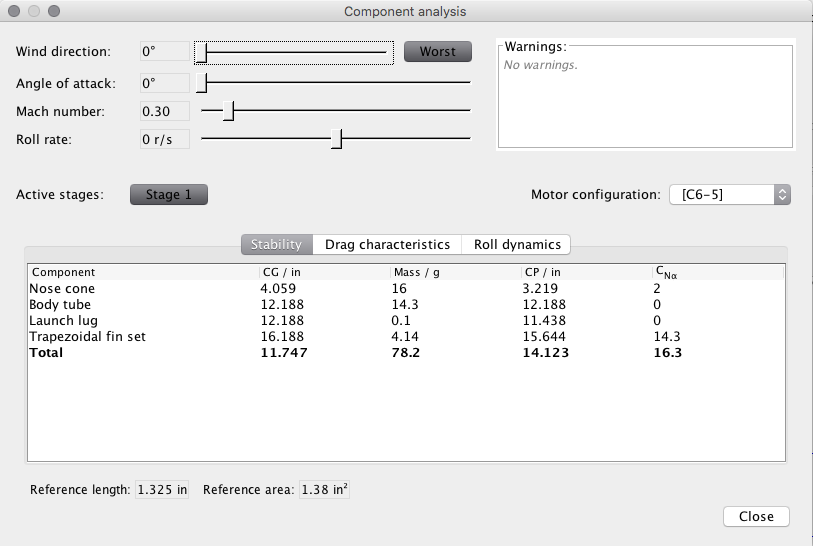
Having built an Openrocket file, NARTREK Gold Rocket v2.ork, for this rocket, I noticed that the CP location was slightly different in the Openrocket simulation with Openrocket showing it .26 inches further back. In reviewing the component analysis used by Openrocket, I found that the difference between the two was caused by a different result in the Fin computations, namely Normal Force of Fins in Presence of Body (CNa)fb where OR had 14.3 and I came up with 12.8. When using the OR number for the fin’s CP computation, I then got the same result. I reviewed my math for the Kfb and (CNa)fb sections of the Barrowman equations, and my math appears to be correct, so I’m unsure why the difference, but even using my more conservative result, the stability is still at 1.52 cal with a C6-5 motor.
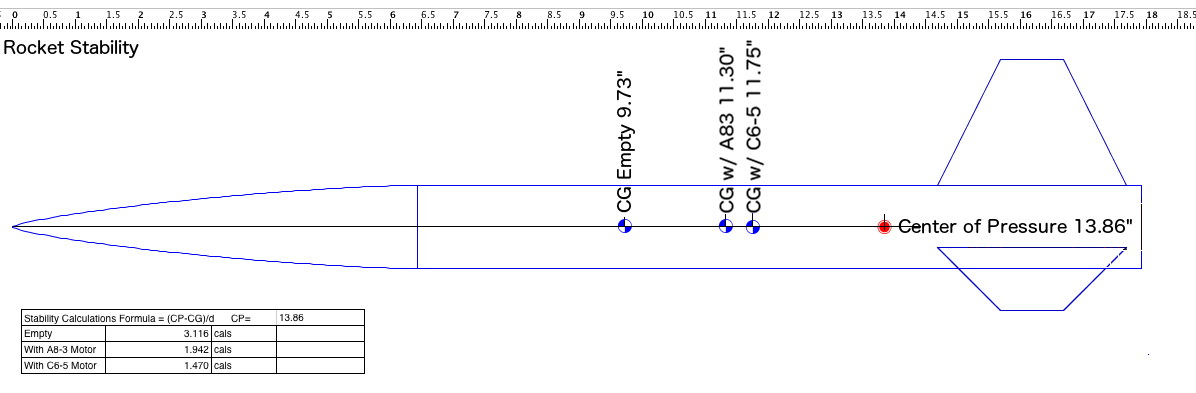
Center of Gravity measurements and stability calculations.
The center of gravity per my calculations came out at 9.73″ from the tip. The simulation in OR was 9.655 for a difference in .08″. Adding a A8-3 motor, the CG move to 11.30, with OR showing 11.24″. Adding in a C6-5 motor, the CG moved to 11.75″, with OR showing 11.71 for a difference of .04″.
Stability Calculations
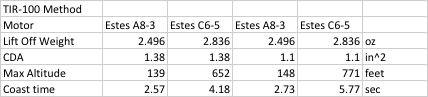
Calculated altitude performance of the model assuming different values of drag coefficient.
–
Actual altitude performance data, recorded on the Flight Summary Sheet.
–
A description of the method(s) used to obtain altitude measurements.
–
Determination of the probable drag coefficient using flight data compared against calculated performance data.
This page will chronicle the progress through the National Association of Rocketry’s NARTREK Silver Achievement program.
In order to successfully complete this program, the following requirements must be met:
1. Make a successful model rocket flight, built from an existing kit or existing plans, of a rocket carrying a payload. The payload may be a Grade A Large hen’s egg, which must be flown and recovered without cracking the shell in any way. The payload may be a camera. If a camera is flown a picture taken from the inflight rocket must be included with the certification documentation. The payload may be a transmitter or computer. If an electronic device is flown a photo of the device must be included in the certification documentation. Detailed notes on the function of the electronic device and a summary of any data gathered during the flight must also be included. You may choose to fly a NAR standard competition payload (refer to the Pink Book for details). You may not fly live animals of any type. Take a photograph of your model and attach it to the certification sheet after completely filling out the rest of the form.
2. Make a successful flight of a model rocket, built from an existing kit or built from existing plans, propelled by three (3) or more simultaneously firing model rocket motors. This may be the same model used for the payload requirement. It is not necessary to fly any payload for this requirement, however. Take a photograph of your model and attach it to the certification sheet after completely filling out the rest of the form.
3. Make a successful thirty (30) second duration flight of a glide recovered model rocket that you have built from an existing kit or existing plans. Take a photograph of your model and attach it to the certification sheet after completely filling out the rest of the form.
4. Build and successfully fly a scale model from an existing model rocket kit, or construct a scale model from basic parts using scale data obtained from the sources outlined in the accompanying documents. With a second party, make an honest evaluation of your model using the form provided. Alternatively, enter your model in a NAR sanctioned Scale or Sport Scale competition, and have the contest scale judges fill out the certification form. Take a photograph of your model and attach it to the certification sheet after completely filling out the rest of the form. We have included judging sheets for both Scale and Sport Scale judging.
These individual sections were completed on the following dates, with the following rockets, motors, and, where applicable, times.
#1 – May 6, 2017 – Estes Super Alpha – Estes C6-5 – Carrying camera and altimeter
#2 – April 29, 2017 – Estes Baby Bertha – Estes A8-3
#3 – May 29, 2017 – Turnup Boost/Glider with Pop pod – Estes A8-3 – 40 – 40 seconds
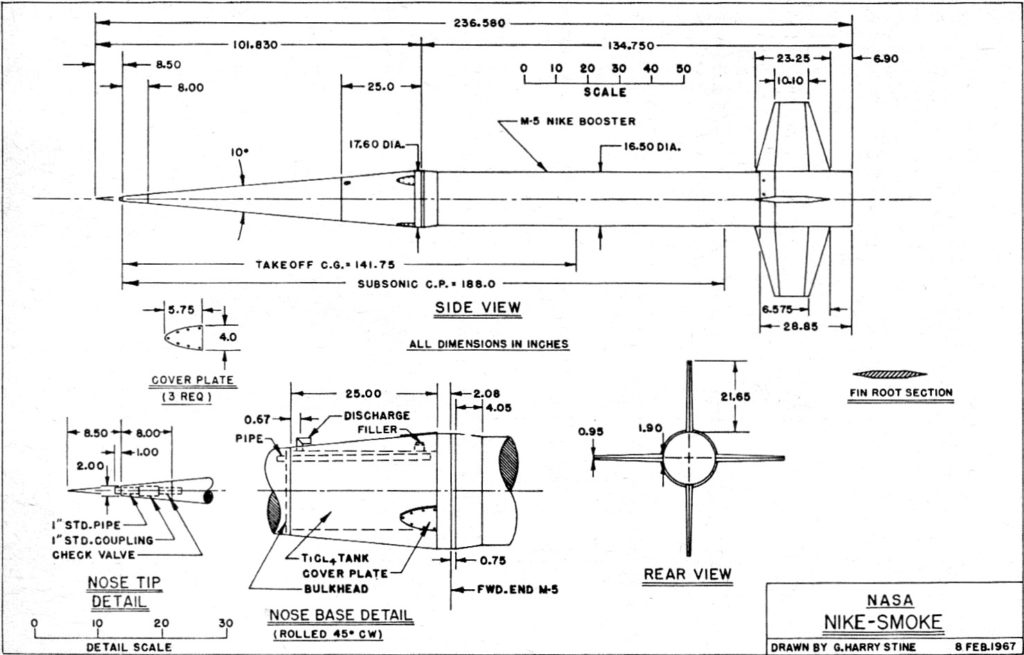
#4 – May 21, 2017 – Estes Nike Smoke – Estes C6-5
The sections were not completed in order, and the following provides details for each section and its successful completion.
Make a successful model rocket flight of a rocket carrying a payload.
The currently out of production Estes Super Alpha rocket was chosen for this section. There were two payloads added to the exterior of the rocket to successfully complete this section. The first was a cheap 808 key chain video camera, and the second was a Jolly Logic Altimeter Three to record the flight data. The motor used was the Estes C6-5.
Both payloads were attached to the rocket using tape with a backup retention device for each device. The payloads were placed just forward of the Center of Gravity to keep the rocket stable in flight.
ATTEMPT #1 – SUCCESS
The rocket was prepped on May 6, 2017, and loaded with the C6-5 motor. The pre-flight check list included the additional steps of powering on the video camera and altimeter, activating the video recording, connecting to the altimeter using a smart phone via Bluetooth, and starting the altimeter’s recording.
The launch was without incident, and the rocket boosted straight off the pad.
The ascent was straight up, and the rocket was successfully tracked to apogee.
The parachute did not deploy at apogee, which appeared to significantly lower than a normal, non-payload, flight, but fired after the rocket had begun it’s decent. The ejection event was observed, and the parachute successfully deployed and fully inflated. The rocket was tracked through the decent to when it touched down.
The rocket landed approximately thirty yards from the launch pad, very close to a building, and was recovered with no damage. Both the video camera and altimeter had made the flight with now damage, and both were still powered on when the rocket was recovered
The video and altimeter data was downloaded from the respective devices, and both appeared to have functioned as expected.
The following still images were taken from the video.
Rocket leaving the launch pad.Rocket ascent after motor burnout.Apogee and rocket laying over.The ejection event. Note the ejected nose cone and parachute at the top of the image.
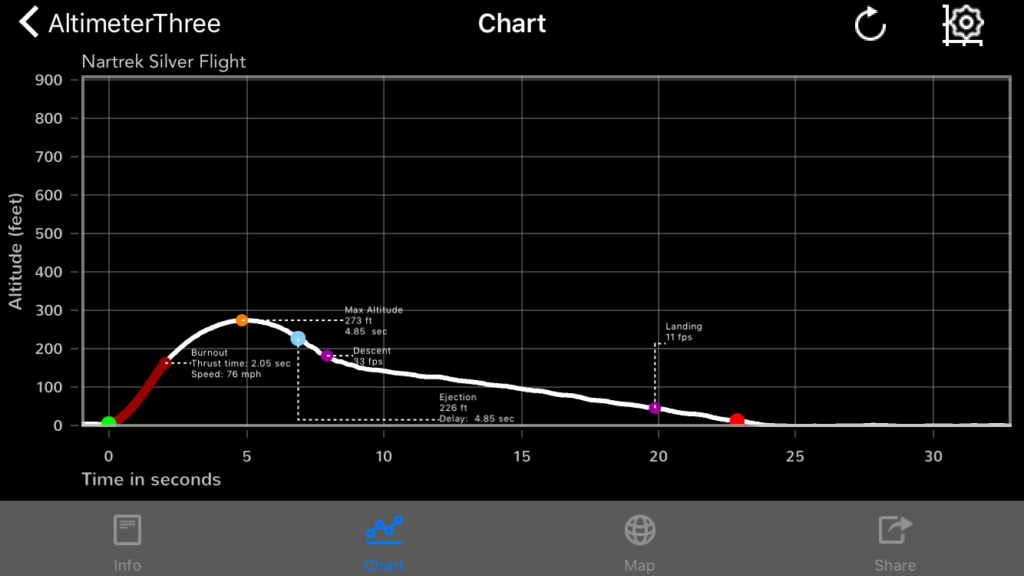
The altimeter data was downloaded into a graph and spread sheet, which are included here.
The max altitude achieved by the rocket was 273, which it reached in 4.85 seconds. The rocket’s maximum speed was 76 mph. As noted during the visual observation of the flight, there was a significant delay between apogee and the ejection event causing the rocket to reach a maximum descent rate of 33 fps before the parachute deployed and it slowed to 11 fps prior to landing.
Both the video and altimeter recorded the flight, and the data was extracted after the rocket was recovered, successfully completing this section of the Nartrek Silver Achievement on May 6, 2017.
Make a successful flight of a model rocket propelled by three (3) or more simultaneously firing model rocket motors.
The Estes Baby Bertha rocket was chosen for this section. The rocket was modified from the standard instructions to accommodate three engine mounts. The two extra motor mounts were built from an Estes Regular Engine Mount kit, and custom centering rings were cut from cardboard. The three motors were placed in a triangular pattern and the retaining hooks were placed to allow the motors to be removed, but not interfere with the other motors. The extra weight in the rear of the rocket moved the center of gravity, CG, to the rear of the center of pressure, CP, and nose weight was added to bring the CG back to the proper position. Almost 2 ounces of clay were secured in the plastic nose cone in order to accomplish the CG correction.
The standard Estes parachute was used for the main recovery device. The motors selected were three Estes A8-3.
ATTEMPT #1 – FAIL (One motor failed to ignite, ignition wire changed flight path)
The rocket was completed on April 29, 2017, and was prepped with the three Estes A8-3 motors as well as extra dog barf to protect the parachute from the three ejection charges. The three igniters were placed in a position that allowed for connection to three separate launch wires.
The original launch controller appeared to have a bad battery and a second launch pad and controller were then used.
Upon launch, one motor failed to ignite and the wire connected to the motor’s igniter remained attached through the boost off the launch rod causing the rocket to angle over and then into the ground. The ejection charges of the two ignited motors fired, and the nose cone and parachute were ejected.
Post flight analysis showed that all three igniters had burned through, and it is likely that the failure to ignite the motor was caused by the igniter being pulled out of contact with the motor during the second launch rod re-loading procedure.
ATTEMPT #2 – SUCCESS
The rocket was reloaded with motors and then launched again on April 29, 2017. Extra care was taken to ensure than all the igniters were fully seated in the motors prior to launch.
The launch was without incident, and the rocket boosted quickly off the pad.
The ascent was straight up, and the rocket was successfully tracked to apogee. An ejection event was observed, and the parachute successfully deployed but did not inflate fully. The rocket was tracked through the decent to when it touched down. The decent was faster than expected due to the failure of the parachute to fully inflate, however the large fins created a “flutter recovery” effect. Post flight analysis showed that the parachute had been melted in two locations causing the chute to fuse and fail to fully open.
The rocket landed approximately three yards from the launch pad, and was recovered with no damage.
All three motors had fired this time, successfully completing this section of the Nartrek Silver Achievement on April 29, 2017.
Make a successful thirty (30) second duration flight of a glide recovered model rocket that you have built from an existing kit or existing plans.
The Estes Astron Skydart II rocket was originally chosen for this section. The rocket was completed per the Estes instructions, but was left primed but unpainted in order to save weight. After the rocket was completed, numerous hand-thrown glide tests were conducted in an effort to get the optimal glide and ensure that the glider would circle during decent. The Estes C6-5 motor was used, along with the standard Estes parachute. We later realized that the requirements state that it must use a B or smaller motor and the http://www.nar.org/wp-content/uploads/2014/05/Status4-1-2A-A-RG-Beach.pdf was built and flown with an Estes 1/2A3-4 motor.
ATTEMPT #1 – FAIL (Glider touched down in 22.1 second)
The rocket was completed on May 7, 2017, and despite less than ideal weather conditions (6-10 mph winds, heavy rain clouds), an attempt was made.
I was assisted with the launch, and the time was witnessed by Iain.
Checking continuity prior to beginning the count down.
The launch was without incident, and the rocket boosted quickly off the pad.
Rocket already beginning to weathercock shortly after clearing the rod.
The rocket began to weathercock shortly after clearing the launch rod, causing the rocket to reach apogee at a much lower elevation than anticipated. The rocket was successfully tracked to apogee. An ejection event was observed, and the parachute successfully deployed. The glider portion of the rocket transitioned to the gliding flight successfully, and the flight path was appropriately curved, but the decent was too steep to achieve the required duration, and the rocket touched down at 22.1 seconds.
Both the rocket and engine tube with parachute were recovered without damage. The rocket was approximately 100 yards from the launch pad, and the engine tube was approximately 150 yards away.
ATTEMPT #2 – Fail (made the time but later learned the launch required a B or smaller motor)
The rocket was reloaded with another motor C6-5 motor and then launched again on May 7, 2017. The screw that controls the elevator pitch was adjusted to provide more climb prior to launch.
Prepped on the pad, ready for the second attempt!
The launch was without incident, and the rocket boosted quickly off the pad.
The ascent was straight up and the rocket was successfully tracked to apogee. An ejection event was observed, and the parachute successfully deployed. The glider portion of the rocket transitioned to the gliding flight successfully, and the flight path was appropriately curved with a slower decent compared to the first attempt. The rocket was lost to sight behind a hill, but the moment it was out of sight was counted at the touch down. The time was 30.42 seconds.
Straight boost, with no weathercocking.The glider and motor tube with parachute separate after apogee.The glider begins its decent to the lower left as the motor tube begins to descent under the parachute.
The rocket landed approximately two hundred yards from the launch pad, the engine tube with parachute approximately 275 yards, and both were recovered with no damage.
The rocket glider landed 30.42 seconds after liftoff, successfully completing the time requirement of this section of the Nartrek Silver Achievement on May 7, 2017, 2017. While completing the paper work for submission, it was noted that a B or smaller motor was required for this section. This was not noted on the requirement form, but was stated in one of the supporting documents.
On May 23, 2017, the rocket was loaded with a Estes A8-3 motor and launched again. Although the rocket boosted of the pad normally, it reached apogee very quickly and was almost to the ground before the ejection charge fired. Although the model landed without damage, it was unable to transition into a stable glide mode and the total time of flight was only 4 seconds.
A second launch was immediately conducted, but the same results occurred with a 5 second flight.
Design Change #1
The requirement to use a B or smaller motor to achieve this section, and the less than stellar performance of the Astron Skydart II on a C6-5 indicated that that model would be less than optimal at achieving this goal. The Nartrek Silver packet contains a number of plans to build various glider models, and the following section will detail the various models built and flown.
The first model built was the Status-4 rocket glider, designed by Tom Beach, with the plans included in the NARTREK packet for this level. The design involved a wing that was held to the rear of the model during the boost phase with a string that burned through by the ejection charge allowing the wing to spring forward (powered by a rubber band) transitioning to a glide position. The motor mount was built from an old nose cone and 13mm body tube with a hole bored just below the nose cone shoulder to allow the ejection gases to escape and to provide a place for the release thread to run.
On the morning of May 26, 2017, the rocket was launched five times using an Estes 1/2A3-4T motor.
The first two launches weather cocked hard over at launch, and were unable to transition into a stable glide mode after the ejection charge fired. They landed in 5 seconds and 4 seconds respectively. Post flight analysis showed that the wing transition mechanism was working correctly, it was just too close to the ground before the string released the wing.
Status – 4 rocket glider
The launch pad was adjusted and the rocket launched again. The boost was more straight up, but the rocket reached apogee and was well into the descent before the ejection charge deployed. The wing transitioned successfully and the rocket transitioned into a stable glide, landing 14 seconds after launch.
The rocket was launched two more times using the same motor. Both flights ended after 6 seconds with the rocket too close to the ground while transitioning to glide mode to achieve any duration.
The last flight landed on a rocky patch of ground breaking the model’s wings and main body into multiple, large pieces, but leaving the wing transition mechanism unhurt.
The rocket was rebuilt and Estes 1/2A3-3T motors were obtained to allow the ejection charge to fire higher in the flight. The second string of launches were conducted during the evening of May 26, 2017.
The first launch saw the rocket slip down over the tape flag used to support the motor mount on the launch rod, and the rocket was stuck on the rod while the motor burned.
The rocket was undamaged and immediately reloaded with the same motor. The second launch saw a good boost, but the ejection charge still was too delayed to allow the rocket to transition into a stable glide before landing after 4 seconds.
Two additional launches were conducted with the Estes 1/2A3-4T motor with 6 and 4 second durations. The final launch ended with the rocket impacting a concrete pad, splintering the model and destroying the wing transition mechanism.
Design Change #2
The inability to transition to glide mode high enough from the ground using the available motors required a rethink on the process, and a second model, the Turnip boost glider, designed by P. Playmaker, and included in the NARTEK Silver packet and available on the NAR website was built. The plans did not include a pop pod design, which was required to launch the glider, and a similar design to that used on the Status-4 was used.
ATTEMPT #14 – #18 – Fail (unable to reach required glide duration using B or smaller motor)
The rocket was completed on May 27, 2017, and launched with aEstes 1/2A3-4T motor.
The boost phase was without incident, but the pop pod did not separate from the glider body at apogee, and the rocket tumble recovered, landing 3 seconds after launch.
Three additional launches were conducted with the same motor, but the pop pod hook was modified each time to attempt to allow it to separate after the boost phase. The times were 3, 4, and 4 seconds respectively, and all flights failed to have the pop pod separate from the glider body before impact.
The rocket was then loaded with an Estes 1/2A3-3T motor and launched. The same issue occurred, with a landing time of only 2 seconds after launch.
Design Change #3
The inability to eject the pop pod after boost would not allow the glider body to make a glide recovery. It was obvious that something was not working correctly with the pop pod design, but a lack of experience was preventing its identification (note, it was later determined that the fix nose cone would not allow for the ejection event to trigger the pod ejection). It was then decided to utilize a Estes Payloader II rocket as the boost vehicle carrying the Turnip glider body. Small spars were added to the Payloader’s body tube and fins which allowed the Turnup to remain stationary during boost. A piece of string was secured around the nose of the glider and held in place by the nose cone of the rocket. When the nose cone was ejected, the string would release the glider body and it would separate from the rocket.
ATTEMPT #19 – #20 – Fail (unable to reach required glide duration using B or smaller motor)
The rocket redesign was completed on May 27, 2017, and launched with a Estes A8-3 motor.
The rocket appeared to be marginally unstable, and the boost stage did not reach a high altitude before apogee. When the ejection charge fired, the rocket was only about 30 feet from the ground, but the glider was released and began a glide descent before touching down 3 seconds after launch.
The rocket and glider were re-prepped for launch with an Estes C6-5 motor to determine if the glider would actually function as a glider during descent. Additional weight was added to the payload section in the form of a screw and modeling clay.
At launch, the rocket began to weather cock immediately after clearing the launch rod, and continued to lay over while gaining elevation. When the ejection charge fired, the glider separated from the rocket and began a slow, circular descent.
After 2 minutes and 30 seconds, the glider was lost to sight (flew in front of the sun), and was unable to be located for recovery. The rocket body was successfully recovered approximately 300 yards from the launch pad.
Despite the setback in being unable to locate the glider body, the duration of flight before it was lost (and it was still well above ground level when it was lost) verified that the design worked and a new glider body was built.
ATTEMPT #21 – #23 – Fail (unable to reach required glide duration using B or smaller motor)
On May 28, 2017, the new glider body was attached to the Estes Payloader II and the rocket was loaded with an Estes A8-3 motor. The rocket appeared to be too heavy for the motor and ejection charge fired just feet above the ground. The glider was released, and did transition into glide mode, but landed 4 seconds after launch.
Turnup glider body being carried by an Estes Payloader II
The rocket was re-prepped, with the same motor, and after removing the majority of the clay weight, it was launched again. The rocket again weather cocked after leaving the launch rod, but the angle was much smaller and the rocket continued to gain altitude throughout the boost stage. The glider was released with the ejection charge and began a gliding descent, landing 13 seconds after launch.
The rocket was again re-prepped, but with a C6-5 motor, with the thought to determine the average of the last two flights so a decision could be made about attempting to obtain a B motor.
The rocket weather cocked at launch, but again gained significant elevation before the ejection charge fired, releasing the glider. The glider began a slow, circular descent and landed 42 seconds after launch.
Design Change #4
Although it appeared that they Payloader boosted Turnip could possibly be used to reach the required duration, the numbers were right on the edge, and it was decided to revisit the Pop Pod design originally called for on the Turnup model. After consulting the Handbook of Model Rocketry, by G. Harry Stine and Bill Stine, another pop pod was constructed based on the Midnight Express model rocket used in the Nartrek Bronze duration requirements. The fin can of the rocket was removed, and the body was secured to a hook mechanism sitting 1/2″ above the glider body. It appeared that the pop pod design required a forward moving mass at motor burn out to cause the rearward movement required to detach the pod hook from the glider body. Once this, in hindsight obvious, piece of information was understood, the rest of the build was quickly accomplished.
The launch conditions were near perfect, with clear skies and almost no wind. The rocket boosted off the pad and appeared to encounter a stronger wind a few hundred feet into the flight causing it to lay over slightly. When the ejection charge fired, the pop pod sepparated from the glider, and descended under a streamer. The shock cord was severed during the decent, but both pieces were recovered with in a few yards of each other.
The glider succesfully transition to glide mode, and began a shallow, circular, glide path to the ground. The glider touched down 40 seconds after lifting off, successfully completing this portion of the Nartrek Silver Achievement on May 28, 2017.
Build and successfully fly a scale model from an existing model rocket kit, or construct a scale model from basic parts using scale data obtained from the sources outlined in the accompanying documents. With a second party, make an honest evaluation of your model using the form provided.
The Estes Nike Smoke Alpha rocket was chosen for this section. The rocket was completed per the Estes instructions, and special care was taken to ensure the fins were correctly profiled. The rocket was painted and detailed based on the Estes instructions and various on-line sources detailing the Nike Smoke color scheme. The Estes C6-5 motor was used, along with the standard Estes parachute.
Objective Judging of Scale Model
Once the rocket was completed and detailed, it was then judged by Andrea using the NARTREK supplied score sheet. The results were as follows:
Scale Data: 47 out of 50
Adherence to Scale:
Accuracy of Major Dimensions: 190 out of 200
Color and Markings: 100 out of 100
Accuracy of Details: 30 out of 50
Degree of Difficulty: 80 out of 100
Craftsmanship: 280 out of 300
Flight Characteristics:
Mission: 195 out of 200
General Flight: 100 out of 100
The Total Score (Points Awarded) was 1022 out of 1100.
In order to allow for an accurate judging in the area of dimensional scale, the following scale drawing of an actual Nike Smoke rocket, created by H. Stein, was used along with the actual measurements of the model rocket. Estes advertises this rocket to be 1/10th scale, and the majority of the measurements were correct. A few smaller measurements appeared to be off, but this was more likely caused by inadequate measuring tools than actually being out of scale.
LAUNCH
The rocket’s objective judging was completed on May 21, 2017, and despite the seemingly ever present winds (6-10 mph winds) the weather was beautiful for a launch attempt.
I was assisted with the launch, and the launch and flight characteristics were witnessed by Iain and Andrea.
The launch was without incident, and the rocket boosted quickly off the pad.
The rocket’s flight path was straight up with no weathercocking. The rocket was visually tracked to apogee, and the white “tracking smoke” from the motor simulated the smoke that the actual rocket would have emitted to allow for the winds at altitude to be measured.
Shortly after laying over, the parachute was observed to deploy and the rocket began a slow descent.
The rocket landed approximately 250 yards from the pad, and was recovered without any major damage. The top of the body tube had a slight bend where it appeared to have impacted the ground on landing, but this was easily bent back leaving the rocket cosmetically unchanged by the launch.
The final section of the scoring worksheet was then completed and the final score totaled as 1022 points out of a possible 1100.
The scale model of the Nike Smoke rocket was objectively judged, flown, and recovered without damage, successfully completing this section of the Nartrek Silver Achievement on May 21, 2017, 2017.
This page will chronicle the progress through the National Association of Rocketry’s NARTREK Bronze Achievement program.
In order to successfully complete this program, the following requirements must be met:
1. Make a successful flight of at least 60 seconds duration with a model rocket you have built from an existing model rocket kit of your choice, using a parachute as the recovery device. Use a motor of no more than “B” total impulse. Someone else must time the flight using either a stop watch or a watch with a second hand. Time the flight from the moment the rocket begins to move until it lands again. Complete the requirement certification sheet. Take a photograph of your model and attach it to the certification sheet.
2. Make a successful flight of at least 30 seconds duration with a model rocket you have built from an existing model rocket kit of your choice, using a streamer as the recovery device. Use a motor of no more than “B” total impulse. This model can be the same one used for the parachute duration requirement, with a streamer substituted for the parachute. Someone else must time the flight in the same manner as for the parachute duration flight. Time the flight from the moment the rocket begins to move until it lands again. Complete the requirement certification sheet. If your model is the same one use for the parachute duration requirement you do not have to take another picture of it. Simply note on the requirement certification sheet that it is the same model.
3. Make a successful two-stage model rocket flight using at least a type “A” motor in the lower and upper stages. Use a model built from an existing model rocket kit. You can use the same model rocket you built for the parachute and/or streamer duration requirements if you add a lower stage. Complete the requirement sheet. Take a photograph of the model and attach it to the certification sheet.
4. Make a successful flight of a model rocket that you have built from an existing model rocket kit that is propelled by a type “D” motor, or larger. Take a photograph of your model rocket and attach it to the completed requirement certification sheet.
These individual sections were completed on the following dates, with the following rockets, motors, and, where applicable, times.
#1 – August 1, 2016 – Estes Hornet – Estes B6-4 – 64.59 Seconds
#2 – August 1, 2016 – FlisKits Midnight Express – Estes B6-4 -31.3 Seconds
#3 – August 6, 2016 – Estes CC Express with Booster – Estes C11-0 & Estes D12-5
#4 – August 6, 2016 – Estes CC Express with Booster – Estes C11-0 & Estes D12-5
The sections were not completed in order, and the following provides details for each section and its successful completion.
Make a successful flight of at least 30 seconds duration using a streamer as the recovery device.
The rocket kit chosen for this section was the FlisKits Midnight Express, a “paper rocket” built entirely out of a single 8.5″x11″ piece of card stock. The kit has been provided for free by FlisKits and can be printed out from any computer. After the rocket is cut out, white glue is used for assembly, and cotton or other thread is used for the shock cord. A piece of clay is placed in the nose cone of sufficient weight to move the center of gravity 6.5″ from the rear of the rocket body, providing the necessary stability for the rocket.
ATTEMPT #1 – FAIL (Rocket not recovered)
The first rocket was completed on July 26th, however high winds delayed the launch until July 28th. The engine chosen for the launch was the Estes B6-4, and a 1″ x 36″ surveyor tape streamer was attached to the shock cord for the recovery.
The launch occurred without incident.
The ascent was straight up, however, the rocket’s small size made tracking difficult, and after apogee, the rocket was lost from sight. No deployment event was observed, and the rocket was never recovered.
ATTEMPT #2 – FAIL (Nose cone and streamer separated from rocket body, rocket body not recovered)
A second group of Midnight Express rockets was completed on July 31st, and the next launch occurred that evening. The same engine was used, but the streamer was changed to a Mylar streamer approximately 4″x 36″ made from a cheap survival blanket.
The launch again occurred without incident, although the rocket weather cocked slightly about 10 feet above the ground,
The rocket was successfully tracked to apogee, and the ejection charge was observed to fire, followed by the streamer deployment. The reflective streamer material made tracking easier, but the slow, drifting manner of the decent indicated a possible problem with the rocket. The decent was timed at well over 90 seconds.
The streamer and nose cone were later recovered more than half a mile from the launch site, but the shock cord had burned through, and the main body of the rocket was never recovered.
ATTEMPT #3 – SUCCESS (31.3 Second Flight)
The third rocket was launched on August 1st, again using the B6-4 motor and a Mylar streamer.
The launch was without incident, and the rocket boosted quickly off the pad.
The ascent was straight up, and the rocket was successfully tracked to apogee. An ejection event was observed, and the streamer successfully deployed. The rocket was tracked through the decent to when it touched down, 31.3 seconds after lift-off, satisfying the duration requirement of this section of the Nartrek Bronze Achievement program.
The rocket landed approximately two hundred yards from the launch pad, and was recovered with no damage.
Make a successful flight of at least 60 seconds duration using a parachute as the recovery device.
The FlisKits Midnight Express rocket was again chosen for this section, with a model equipped with an 8″ Mylar parachute setup for the attempt.
ATTEMPT #1 – FAIL (Nose cone separated from body, body not recovered)
On August 1st, the rocket was launched without incident
The rocket was successfully tracked to apogee, and the ejection charge was observed to fire, followed by the parachute deployment. It appeared that the body separated from the parachute and nose cone when the ejection charge fired, and this was later confirmed with the recovery of the nose cone and parachute with a burned through shock cord. The body of the rocket was not recovered. The duration of the flight was just over 50 seconds.
ATTEMPT #2 – FAIL (48 Second Flight)
A decision was made to switch rockets after the repeated failures in the Midnight Expresses’s shock cord, and an unpainted Estes Hornet was chosen for the next attempt. A parachute, that was at least 24″ wide, was cut out of the Mylar survival blanket and attached to the nose cone with 100% cotton thread using the standard six point attachment.
The rocket was again launched on August 1st, but weather cocked significantly shortly after clearing the rod.
The rocket was successfully tracked to apogee, and the ejection charge was observed to fire, followed by the parachute deployment. The rocket was tracked through decent and successfully landed without damage about 300 yards from the launch pad. The duration of the flight was 48 seconds.
ATTEMPT #3 – SUCCESS (64.59 Second Flight)
The rocket was launched for a second time on August 1st, and, having angled the launch pad slightly to account for the wind, made a straight up ascent.
The rocket was successfully tracked to apogee, and the ejection charge was observed to fire, followed by the parachute deployment. The rocket was tracked through decent and successfully landed without damage about 800 yards from the launch pad.
The duration of the flight was 64.59 seconds satisfying the duration of this section of the Nartrek Bronze Achievement program.
Make a successful two-stage model rocket flight.
The Estes CC Express two stage rocket was chosen for this and the last section. The rocket was built per the Estes instructions, and the standard parachute was used for the main recovery device. The booster section used tumble recovery. The booster motor was an Estes C11-0, and the main motor was a D12-5.
ATTEMPT #1 – SUCCESS (Booster section and Main rocket recovered with no damage)
The rocket was launched on August 6th.
The launch was without incident, and the rocket boosted quickly off the pad.
The booster stage successfully separated from the main rocket, and the main motor ignited.
The rocket was successfully tracked to apogee, and the ejection charge was observed to fire, followed by the parachute deployment. The rocket was tracked through decent and successfully landed without damage about 50 yards from the launch pad.
The booster was found about 25 yards from the pad.
Both parts of the rocket were recovered without any damage, satisfying this section of the Nartrek Bronze Achievement program .
Make a successful flight of a model rocket that you have built from an existing model rocket kit that is propelled by a type “D” motor, or larger.
The same Estes CC Express two stage rocket used in section 3 was again chosen for this section. Although the rocket did not need to launch with the booster section to meet the requirement of this section, after the success of the last launch, it was again included. The booster motor was an Estes C11-0, and the main motor was an Estes D12-5.
ATTEMPT #1 – SUCCESS (Main Rocket Motor D12-5, Booster section and Main rocket recovered with no damage)
The rocket was again launched on August 6th.
The launch was without incident.
The booster stage successfully separated from the main rocket, and the main motor ignited.
The rocket was successfully tracked to apogee, and the ejection charge was observed to fire, followed by the parachute deployment. The rocket was tracked through decent and successfully landed without damage about 150 yards from the launch pad.
The booster was found about 40 yards from the pad.
Both parts of the rocket were recovered without any damage after launching with a Estes D12-5 as the main motor, satisfying this section of the Nartrek Bronze Achievement program .
After spending a few hours launching the T-Bolt air rocket, the weather improved to the point it looked like it might be suitable for launching our Payloader II with its included Lego astronaut.
The first try didn’t go so well with the Estes C6-5 motor ignigting without issue but the rocket failed to leave the pad. It completed its burn and then ejected the nose cone and parachute while still on the rod. The pad was damaged with the motor having burned through the blast plate, plastic frame and scorching the grass under the pad. As it was so wet from all of the rain, this wasn’t a problem as far as a grass fire was concerned.
After examining the rocket, it appeared to be in good shape. The failure to leave the pad appeared to have been caused by the engine retaining hook which was pushing on the launch rod. This may have caused the rocket to hang up, although the rocket seemed to slide easily on the rod.
After a reset of the chute and loading another motor, we set it up again with one of our old pads. This time it worked as expected and the rocket blasted into the sky.
The rocket flew pretty much straight up and disappeared against the high clouds for a few seconds until the chute popped and we then began tracking the rocket as it descended. It took over two minutes to finally come back to ground almost a half mile away in two to three feet deep grasses. Luckily we had a retriever with us who was able to sniff it out and make the recovery.
But we soon noticed that it was missing the nose cone and the Lego astronaut and figured it must have come off when the ejection charge fired as the eye-bolt that had been screwed into the base of the cone was still attached to the shock cord. Although it was a long shot, we began to walk around under the area where the chute deployed with the hopes that we might be able to find part of the nose cone. It must have been Iain’s day since we found the nose cone laying in the driveway on the opposite side of the shelter belt. The nose cone had only sustained a little damage, and the Lego astronaut was in perfect shape!
He’s happy to be back on the ground after almost being incinerated and then falling back to earth with out any sort of recovery device!
After being without any rocket motors for a few months, we got a few packs to try out some of the small rockets. Iain helped load the motors and ignitors in the rockets and then used his Estes mini-launch pad and controller to send the rockets flying. Both rockets launched without issue and were successful recoveries.
The second rocket (see video below) must have hit some strong wind as it curved over after burnout and was halfway back to the ground before the parachute popped. The fin can came loose but was easily glued back on and both rockets are ready to fly again!
After a long delay, we had a perfect day for a launch and decided to send the Estes D-Region Tomahawk up for the first time!
This rocket has been in the building phase for a few months do to a delay in the painting process, but it was complete enough to have a first launch. The final paint and clear coat could wait.
I think someone is very happy!Its as tall as he is!
This is currently the largest rocket in our fleet, and we were hoping for a good flight on an Estes E9-6.
Once the rocket was loaded on the rail, we tilted it up and prepared for launch. The launch controller was hooked up and showed good continuity through the ignitor sothe count down started!
5, 4, 3, 2, 1, Launch!I was a little slow on the shutter and the rocket had already left the pad.
There was no delay between launch and ignition, and the rocket wasted no time in accelerating off the pad into the sky!
As the rocket climbed, it hit a layer of wind and weather cocked over the top of us. As one observer commented, it looked like an ICBM laying over after launch. As it continued to curve over, I was beginning to think we were going to have bad ending, but the delay finally burned through, and the deployment charge popped the nose cone out and the chute popped. It then drifted down for a landing in the field about 200 yards away from the launch pad.
All parts present and accounted for!
After inspection, it appeared that rocket had survived with no damage other than two loose fins on the side that impacted the ground. This was easily fixed and the rocket is ready for its final painting and hopefully many more flights in the future.
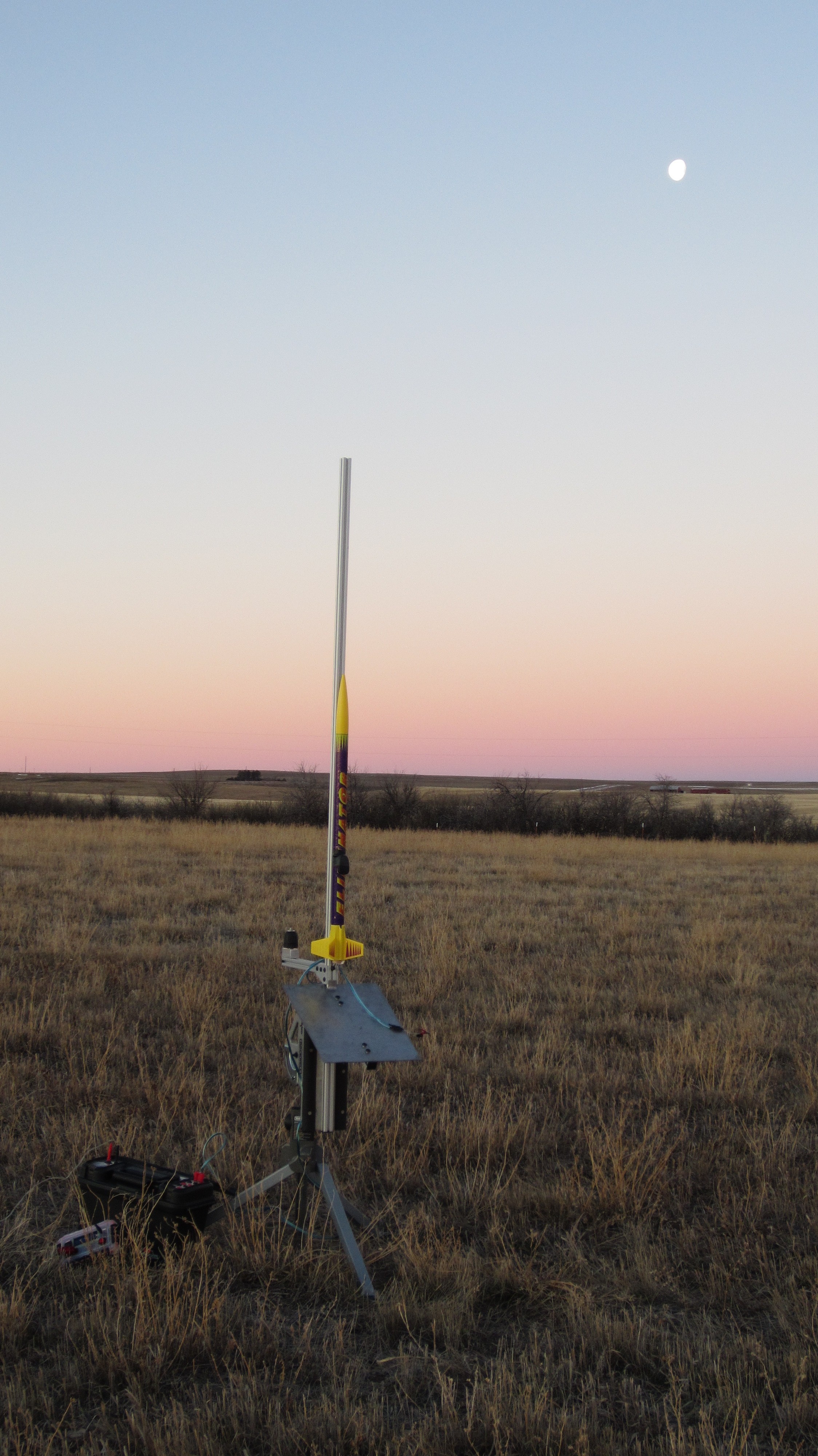
After completing a simple Estes Eliminator kit (modifying it with rail buttons rather than the standard tube guides) and purchasing some E9-6 motors, I was finally able to test my new rail launch pad. The pad is made using a Rockwell JawStand for the base. This gives an adjustable head to tilt the rail if needed, and also makes it very easy to load the rocket by laying over 90 degrees. I then attached a 6 foot long piece of 80/20 1010 rail to the head using a sheet of 1/4″ aluminum and 80/20 connectors, making a very stable and secure mount. The last piece was the blast deflector which I fashioned out of 12 gauge stainless steel mounted to a 60 degree 80/20 connector and another piece of 1010 rod. I ended up loosing a little over a foot of the rail with the mounting setup I used, but it should still be long enough for the type or rockets I’m currently using.
In order to be able to use the pad with rockets with standard tube type launch lugs, I installed an additional piece of 1010 rail off the back side of the upright and mounted a drill chuck vertically with a 1/8″ rod and stainless steel blast deflector. Over all, I’m very pleased with how it turned out. I even picked up an 8 foot length of 1010 rail in case I need a longer rail for a larger rocket in the future!
The weather has not been conducive to launching rockets (winds over 30 mph), but it seemed to be cooperating this morning with only a light breeze. I was up and had the pad setup before the sun cleared the horizon, and was all set for a sunrise launch. As the sun finally hit the launch tower, I pushed the launch button and was rewarded with nothing. I had noted that the launch controller’s screen was blank, but figured it was just the cold temperatures. It was making the proper sound notifications for the launch sequence, and even after changing out the battery to a fresh one, it still wasn’t displaying anything on the screen. The larger problem was with the relay system in the battery box. Apparently, everything shifted at some point and the cuircut I have been using to convert the 5 volts from the controller to the 9+ volts needed to trip the relay had wires pulled out of the board. After a few frustrating minutes of trying to get a field expediant work-around, I finally took everything down and returned home to work where I could at least feel my fingers,
Once in the heat, I found that there were numerous issues with the battery box wiring and managed to blow the fuse in my last functioning multimeter trying to trouble shoot. The wind also began to pickup, and I decided to rig a quick fix using some aligator clips, a 9 volt battery and 30 foot piece of speaker wire. It wasn’t pretty, but it seemed to work.
Once I had everything set back up and connected, I loaded the rocket on the rail, hooked the clips to the ignitor, started the cameras, and used the 9 volt battery to trigger the relay. The 12 volt battery did its job as usual and there was almost instantaneous ignition and the rocket accelerated of the pad with out issue! It did begin to tilt into the wind, and as it gained altitude, it continued to lay over until it completly on its side at apogee. Despite this, the parachute deployed with the motor’s ejection charge and the rocket began to drift back towards the launch site. It appeared that the rocket was set for a landing very close to where it lifted off, but I then found one of the possible causes for the tilting at the end of the flight. There was a layer of much higher winds a few hundred feet up, and when the rocket entered that area, it was quickly blown over a quarter mile away, where it finally came to rest.
Rocket almost horizontal just prior to apogeeEjection charge firing!
No damage was done to the rocket or on-board camera, and the rail system worked perfectly, so overall it was a successful test! I was also able to get the controller and battery box re-worked and they seem to be functioning correctly and the moment.
Here is the launch video for your viewing pleasure!




 The rocket boosted straight up, and despite the steady winds, didn’t seem to be effected at all.
The rocket boosted straight up, and despite the steady winds, didn’t seem to be effected at all.














































 Status – 4 rocket glider
Status – 4 rocket glider